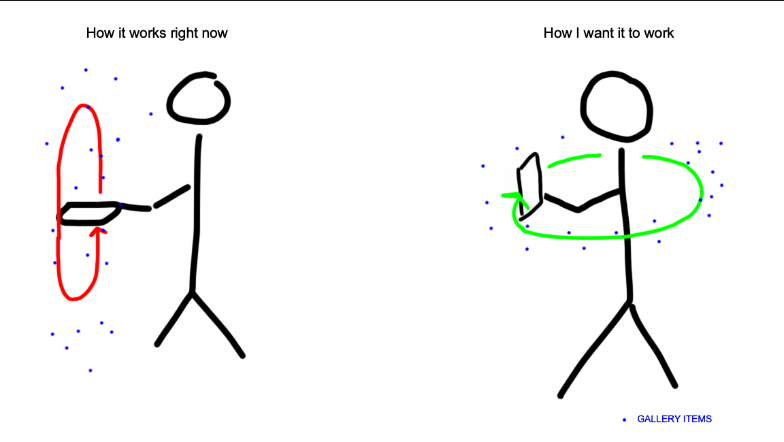
I’m using three.js and DeviceMotion events to make a 3d gallery, where camera rotation on mobile is determined by device rotation (alpha, beta, gamma). Everything works as intended, except I want to change the “base” state from phone laying face up in portrait to phone being held up in portrait.
if (isMobile && !/iPad|Macintosh/i.test(navigator.userAgent)) {
camera.position.set(0, 0, 0);
// Mobile device controls (using device orientation)
window.addEventListener("deviceorientation", (event) => {
const alpha = (event.alpha * Math.PI) / 180;
const beta = (event.beta * Math.PI) / 180;
const gamma = (event.gamma * Math.PI) / 180;
var euler = new THREE.Euler(beta, gamma, alpha, "YXZ"); // ' is the order of rotations
// console.log(
// `DeviceOrientationEvent: alpha ${alpha}, beta ${beta}, gamma ${gamma}`
// );
var quaternion = new THREE.Quaternion();
quaternion.setFromEuler(euler);
camera.setRotationFromQuaternion(quaternion);
});
// Disable OrbitControls
controls.enabled = false;
}
I’ve tried applying a shift to the alpha/beta/gamma values, as well as rotating the whole scene, but both seem to break the rotation. I apologize if the solution is really simple, I’m not the best with geometry
So I see that you disabled the orbit controls. Idk why you have orbit controls in the first place if you’re simply using event listeners for device orientation to position the camera and orientation.
Maybe I don’t understand enough…but try removing/ messing with the orbit controls.
If you don’t really want to do that just keep whatever code you have right now, and just change the entire scenes rotation.
I wouldn’t consider myself a master at Three Js, but I do a bit of OpenGl graphics programming, and in that case, you move the scene not the camera.
More info would be appreciated. Sorry if I wasn’t helpful. Hope you figure it out. Thanks!