Given the attached mesh, how does one compute the smallest bounding box? The mesh has no rotation.
The white area represents the current bounding box.

That’s a simple question regarding a non-trivial problem. Which is, btw, subject of ongoing academic research. Search “multivariate optimisation” for more.
I could have wrote a complex question but I prefer to keep it light. I can conclude there is no simple way atm. Thanks for your reply.
There was no offence intended re. your question. It is perfectly adequate to bring across what you are looking for. It’s just, that you happened to tap into a very deep pit …
Thanks for this. Yes it isn’t a trivial problem. But as I’m new to threejs I was wondering if it had something for it out of the box. Although as an alternative I was wondering if trying something such as aligning the ‘longest part’ of a mesh to an axis before measuring the boundingbox wouldn’t do better (which I have no idea how to do it yet).
three.js can compute axis-aligned bounding boxes and object-oriented bounding boxes. But if (as it sounds) this mesh doesn’t have any rotation — just the vertex data happens to have the shape of a rotated box — I don’t think there’s anything built in that would fit the box more tightly for you. If you could settle for a ConvexHull instead of a box, that’s an option.
Let’s assume, you’re interested in the smallest (by volume) bounding box. Which depends on the rotational state of your mesh, that is: r.x, r.y, r.z, assuming it’s the mesh you’re rotating. Because Three.js can give you axis-aligned bounding boxes only.
To give you a little idea how this problem could be approached: a genetic algorithm, which is imo nothing more than a fancy word for a computerised trial&error method. It’s an iterative process, which involves the repeated introduction of “small” changes in one or more of the result-influencing parameters, in your case: r.x, r.y, r.z.
It goes like this:
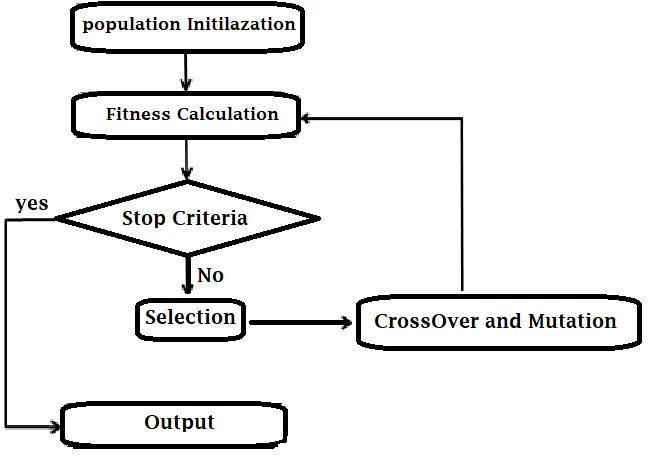
Source: https://vidyasheela.com/web-contents/img/post_img/27/GA%20Flow%20diagram.png
“Population initialisation”: your first mesh orientation which you showed us.
“Fitness calculation”: compute the bounding box volume for this set of parameters r.x, r.y, r.z .
“Stop criteria”: is it good enough? If so, you’re done.
If not good enough,
“Select” the one parameter set which you currently have.
“Crossover and Mutation”: change one parameter of this set by a small amount, i.e. r.x += 𝛆
Recompute bounding box volume.
If it has improved (become smaller than the previous one) , continue along the same direction of the last change, that is: keep increasing r.x , until you arrive at the 1st increase in bounding box volume.
If your 1st change resulted in a deterioration already, reverse the direction of your change: r.x -= 𝛆
and proceed as before.
Note, that you may get trapped in a local minimum, which may be worse than the global minimum:

Source: https://freecontent.manning.com/wp-content/uploads/evolutionary-algorithms_01.png
And then you have two more parameters r.y, r.z, which may all be inter-dependent on each other and r.x. Meaning: after doing this for r.y too, chances are, that r.x may be improved further still.
You see, it can get complicated pretty soon. That’s why I mentioned the ongoing scientific effort in this area of research. I do believe, that you can arrive at a better solution than you already have pretty quickly. Without knowing however, how far away from the best solution you end up.
Thanks for taking quite a bunch of your time to give such a clear explanation on a potential solution to that complex problem! I hope I’ll have some time to try such algorithm.