Hi all,
I am creating hexagonal sphere and trying to get clockwise angle of three tiles.

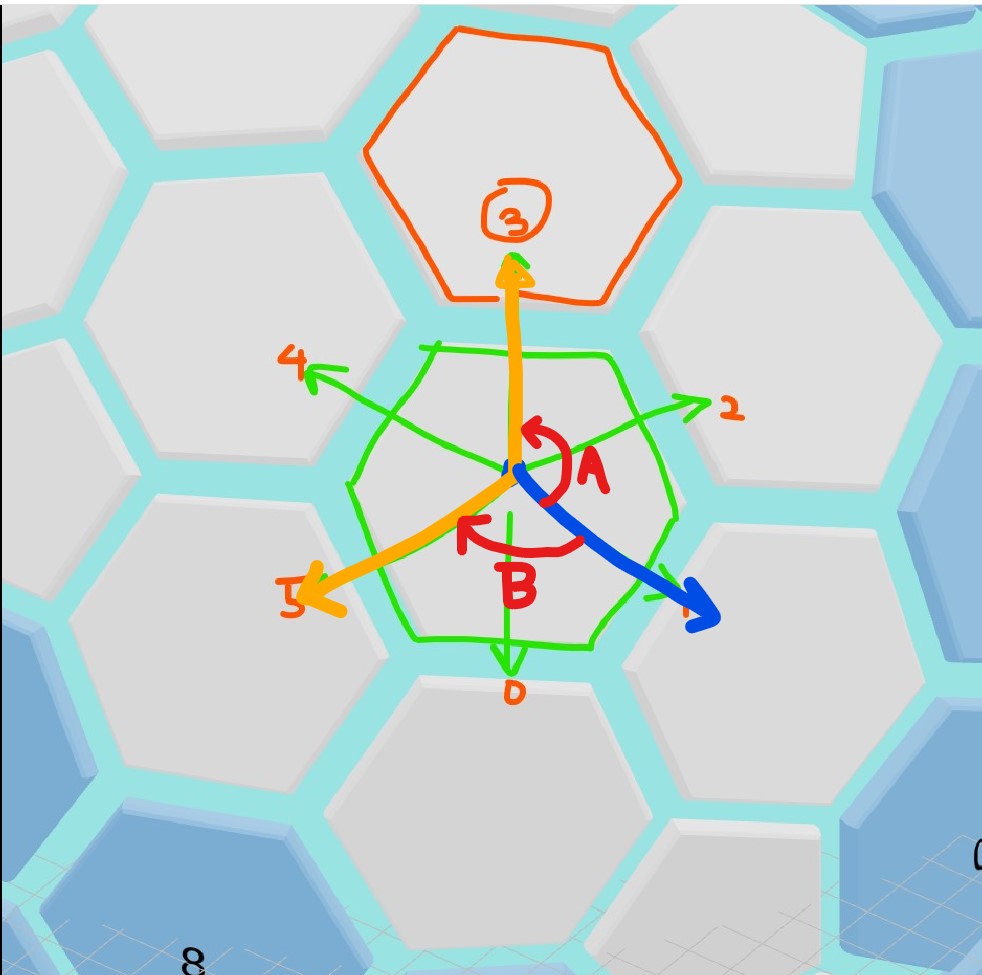
(The blue tiles is just ranomly generated)
For example, I want to get clockwise angle between cn and cp based on cp axis.
p is center of tile no.10.
c is center of tile no.11.
n is center of tile no.12.
I’ve tried “angleTo” function, but only get the inner angle(0~180).
let cp = new THREE.Vector3(p[0] - c[0], p[1] - c[1], p[2] - c[2]);
let cn = new THREE.Vector3(n[0] - c[0], n[1] - c[1], n[2] - c[2]);
let a = cn.angleTo(cp);
console.log((a * 180) / Math.PI);
Also, tried “setFromCoplanarPoints”, but I think the nomal plane is not working as I expected.
let normal = new THREE.Plane().setFromCoplanarPoints(
new THREE.Vector3(c[0], c[1], c[2]),
new THREE.Vector3(p[0], p[1], p[2]),
new THREE.Vector3(n[0], n[1], n[2])
).normal;
console.log((normal.z * a * 180) / Math.PI);
Finaly, I’ve tried to calculated Euler Angle, but could not figure out what the next step is…
//http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/index.htm
var qrot = new THREE.Quaternion();
qrot.setFromUnitVectors(cp.normalize(), cn.normalize());
let sqw = qrot._w * qrot._w;
let sqx = qrot._x * qrot._x;
let sqy = qrot._y * qrot._y;
let sqz = qrot._z * qrot._z;
let heading = Math.atan2(2 * qrot._y * qrot._w - 2 * qrot._x * qrot._z, 1 - 2 * qrot._y * qrot._y - 2 * qrot._z * qrot._z);
**The initial tiles and next tile have fixed position.
None of those approches not working. I might miss some axis settings or calculation. I would greatly appreciate if you could give some advice.
[UPDATE]
Is there way to distinguish the degree A and degree B?
[SOLVED] by @rrrr_rrrr
get the cross product of the two vectors and use the right hand rule to determine the direction of the angle.
let p = new THREE.Vector3(p.x, p.y, p.z); // previous tile
let c = new THREE.Vector3(c.x, c.y, c.z); //current tile
let n = new THREE.Vector3(n.x, n.y, n.z); // next tile
let cp = p.sub(c).normalize();
let cn = n.sub(c).normalize();
let angle = ((cp.clone().cross(cn).z < 0 ? -1 : 1)*Math.acos(cp.dot(cn))*180/Math.PI);
Thank you in advance for your help.